5. Механика
 Читать 0 мин.
Читать 0 мин.
5.548. Механические колебания
Колебания ― это процесс, при котором состояние системы изменяется, повторяясь во времени, и смещаясь то в одну, то в другую сторону относительно состояния равновесия.
Период ― это время, через которое повторяются показатели системы, т. е. система совершает одно полное колебание. Период изменяется в секундах.
Частота ― величина обратная периоду: число полных колебаний за единицу времени. Частота измеряется в герцах [Гц] = [c-1]. Частота равна v = $\frac{1}{T}$ , где
v ― частота [Гц];
T ― период [c].
Если известно, что тело совершает N колебаний за время t, то частоту его колебаний можно определить как v = $\frac{N}{t}$ , где
ν ― частота [Гц];
N ― количество колебаний;
t - время [с].
Для описания колебательных систем, совершающих круговые процессы, удобно использовать круговую (циклическую) частоту. Циклическая частота показывает количество полных колебаний, которые происходят за 2π секунд и равна ω = 2πvили ω = $\frac{2\pi}{T}$ , где
ω ― циклическая частота [рад/с];
ν ― частота [Гц];
T ― период [c].
Гармонические колебания ― колебания, в которых физические величины изменяются по закону синуса или косинуса. Кинематическое уравнение гармонических колебаний имеет вид:
x(t) = Asin(ωt + φ0) или x(t) = Acos(ωt + φ0), где
x ― смещение [м];
t ― время, [с];
A ― амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
φ0 ― начальная фаза колебаний, [рад];
(ωt + φ0) ― полная фаза колебаний [рад].
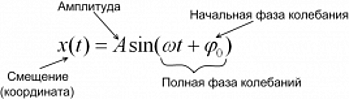
Смещение (x) ― это отклонение тела от положения равновесия. Смещение также является координатой тела, если отсчитывать ее от положения равновесия.
Амплитуда колебаний (A) ― максимальное отклонение колеблющейся величины от положения равновесия, т. е. максимальное смещение равно амплитуде колебаний xmax = A.
Начальная фаза колебаний (φ0) определяет смещение в начальный момент времени, выраженное в радианах.
Фаза колебаний (φ) или полная фаза колебаний, определяет смещение в данный момент времени, выраженное в радианах. Фаза колебаний равна φ = ωt + φ0, где
φ ― полная фаза колебаний [рад];
φ0 ― начальная фаза колебаний, [рад];
ω ― циклическая частота [рад/с];
t ― время, [с].
Пример анализа гармонических колебаний точки
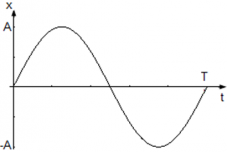
Рассмотрим гармонические колебания, в которых уравнение движения точки имеет вид x(t) = Asin(ωt), где
x ― смещение [м];
t ― время, [с];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с].
Из уравнения x(t) = Asin(ωt) следует, что начального смещения нет (φ0 = 0) и колебания начинаются из положения равновесия. Смещение x достигает максимального значения xmax и равно амплитуде xmax = A, в тот момент, когда модуль синуса равен единице |sin(ωt)| = 1. Когда x = A фаза колебаний равна φ = $\frac{\pi}{2} +2\pi n$ когда x = –A фаза колебаний принимает значения φ = $\frac{3\pi}{2} +2\pi n$ , где n = 0, 1 , 2, … N.
График колебания координаты точки имеет вид:
Определим уравнение и график колебания скорости. Скорость ― это производная координаты по времени: v = xt', где
v ― скорость движения точки [м/с];
x ― координата точки [м];
t ― время, [с].
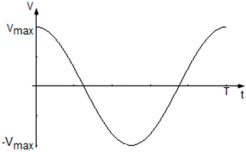
Так как закон изменения координаты нам известен x(t) = Asin(ωt), скорость движения колеблющейся точки: v = xt' = |Asin(ωt)|'t = Acos(ωt).
Уравнение скорости точки равно v(t) = Acos(ωt), где
v ― скорость движения точки [м/с];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
t ― время, [с].
Сравнив уравнение v(t) = Aωcos(ωt) с кинематическим уравнением гармонических колебаний, легко заметить, что Aω ― амплитуда изменения скорости, а ωt ― фаза колебаний скорости. Таким образом, максимальное значение скорости равно vmax = Aω, и оно достигается при | cos(ωt) | = 1, т. е. тогда, когда фаза колебаний скорости равна φ = πn, где n = 0, 1, 2, … N.
График колебания скорости точки имеет вид:
Аналогично определяются уравнение и график колебания ускорения точки, которая движется по гармоническому закону.
Ускорение ― это производная скорости по времени: a = vt', где
a ― ускорение движения точки [м/с2];
v ― скорость движения точки [м/с];
t ― время, [с].
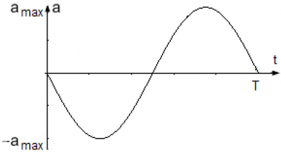
Так как закон изменения скорости был определен выше v(t) = Aωcos(ωt), определим ускорения движения колеблющейся точки: a = vt' = [Aωcos(ωt)]t' = –Aω2sin(ωt).
Уравнение ускорения точки равно a(t) = –Aω2sin(ωt), где
a ― ускорение движения точки [м/с2];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
t ― время, [с].
Модуль ускорения точки максимален, когда |sin(ωt)| = 1 ― тогда же, когда достигает максимума смещение точки. Максимальное ускорение, т. е. амплитуда ускорения точки равна amax = Aω2.
График колебания ускорения точки имеет вид:
Во время гармонических колебаний, формы энергии колебательной системы все время находятся в процессе взаимной трансформации. В механической колебательной системе преобразуется механическая энергия: потенциальная энергия ― в кинетическую, а затем кинетическая энергия ― вновь в потенциальную. Полная механическая энергия колеблющейся системы постоянна, и в любой момент времени справедлив закон сохранения энергии E = EП + EK, где
E ― полная механическая энергия системы, E = const, [Дж];
EП ― потенциальная энергия системы, изменяющаяся во времени, [Дж];
EK ― кинетическая энергия системы, изменяющаяся во времени, [Дж].
Рассмотрим изменение потенциальной энергии пружинного маятника, который колеблется по гармоническому уравнению x(t) = Asin(ωt).
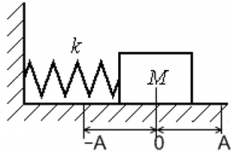
Потенциальная энергия деформированной пружины равна EП = $\frac{kx^2}{2}$ , где
EП ― потенциальная энергия деформированной пружины, [Дж];
k ― коэффициент упругости пружины [Н/м];
x ― деформация пружины (величина ее удлинения или сжатия) [м].
У пружинного маятника деформация пружины ― переменная величина, которая зависит от времени. Кинематическое уравнение движения точки, принадлежащей этому маятнику ― x(t) = Asin(ωt). Следовательно, потенциальную энергию пружинного маятника можно записать как EП = $\frac{k(x(t))^2}{2}$ = $\frac{k(A\sin(\omega t))^2}{2}$ = $\frac{k}{2} \cdot A^2 \sin^2 (\omega t)$ .
Уравнение потенциальной энергии пружинного маятника EП = $\frac{k}{2} \cdot A^2 \sin^2 (\omega t)$ , где
EП ― потенциальная энергия пружинного маятника, [Дж];
k ― коэффициент упругости пружины [Н/м];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
t ― время, [с].
Амплитуда потенциальной энергии пружинного маятника равна EПmax = $\frac{k}{2}A^2$ , где
EПmax ― максимальная потенциальная энергия пружинного маятника, [Дж];
k ― коэффициент упругости пружины [Н/м];
A — амплитуда колебаний [м].
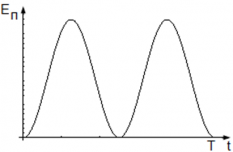
Потенциальная энергия пружинного маятника равна нулю, когда sin(ωt) = 0 ― когда маятник проходит положение равновесия, и максимальна, когда sin(ωt) = 1 ― когда маятник находится в крайних положениях, т. е. когда его смещение равно амплитуде.
График колебаний потенциальной энергии пружинного маятника:
Рассмотрим изменение кинетической энергии маятника. Кинетическая энергия тела равна Eк = $\frac{mv^2}{2}$ , где
Eк ― кинетическая энергия тела, [Дж];
m ― масса тела, [кг];
v ― скорость движения тела, [м/с].
У тела, которое совершает колебательные движения, скорость ― переменная величина.
Выше было показано, что если уравнение движения точки имеет вид x(t) = Asin(ωt), то уравнение скорости точки v(t) = Aωcos(ωt). Таким образом, кинетическая энергия маятника равна Eк = $\frac{m(v(t))^2}{2}$ = $\frac{m}{2} \cdot (A\omega\cos(\omega t))^2$ = $\frac{m}{2} \cdot A^2 \omega^2 \cos^2 (\omega t)$ .
Уравнение кинетической энергии маятника Eк = $\frac{m}{2} \cdot A^2 \omega^2 \cos^2 (\omega t)$ , где
Eк ― кинетическая энергия маятника, [Дж];
m ― масса тела, [кг];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с];
t ― время, [с].
Амплитуда кинетической энергии маятника равна EКmax = $\frac{m}{2} \cdot A^2 \omega^2$ , где
EКmax ― максимальная кинетическая энергия маятника, [Дж];
m ― масса тела, [кг];
A — амплитуда колебаний [м];
ω ― циклическая частота [рад/с].
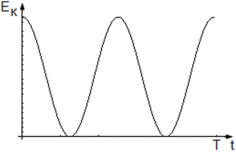
Максимальная кинетическая энергия маятника достигается тогда, когда cos2(ωt) = 1 ― маятник проходит положение равновесия, и она равна нулю, когда маятник находится в крайнем положении.
График колебаний кинетической энергии маятника:
Математический маятник ― это колебательная система, состоящая из материальной точки, подвешенной на нерастяжимой нити или стержне.
Период колебаний математического маятника равен T = $2\pi \sqrt{\frac{l}{g}}$ , где
T ― период колебаний [с];
l ― длина нити математического маятника [м];
g ― ускорение свободного падения [м/с2].
Период колебаний пружинного маятника равен T = $2\pi \sqrt{\frac{m}{k}}$ , где
T ― период колебаний [с];
m ― масса груза [кг];
k ― жесткость пружины [Н/м].
Существует особый тип колебаний ― вынужденные колебания. Вынужденные колебания происходят только под постоянным периодическим внешним воздействием и их характеристики зависят от характеристик этого воздействия.
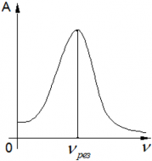
Если частота внешнего воздействия, которое вызывает вынужденные колебания, совпадает с собственной внутренней частотой колебательной системы ― возникает явление резонанса. При резонансе резко возрастает амплитуда колебаний системы. Частота, при которой возникает явление резонанса, называется резонансной частотой.
На рисунке показан график резонансной кривой ― увеличение амплитуды при совпадении частоты внешнего воздействия с внутренней частотой системы.